自动水龙头(水龙头/阀)控制器
正如你可能知道,一个水龙头自动控制在一定程度上可以显著地降低水的消耗量。此外,自动水龙头可以通过避免手和水龙头的表面细菌接触消除交叉污染。
这里介绍的是一个简单的电子电路,可以利用一个被动红外传感器(PIR)运动传感模块有效帮助控制电磁阀门的开启和关闭。在实践中,自动水龙头不存在运动传感器。他们采用主动红外技术,感知手的“存在”而不是“运动”的对象。然而,这里有一个非传统的被动红外技术被用来实现6VDC动力智能水龙头控制电路!
该水阀控制器的电路原理图
智能阀门控制器是一个组合的四个关键组件:
- 红外传感器
- 电磁阀
- 电源
- 水龙头
如上所述,在电路的核心是一个被动红外(PIR)模块。PIR传感器是一种检测运动的热释电装置,通过测量由周围的物体发射的红外线水平的变化。热释电设备,如红外传感器,具有元件由晶体材料产生的电荷时,接触到的红外辐射。在红外撞击元件产生的电压变化量的变化,这是由一个机载测量放大器。

该器件包含一个特殊的过滤器被称为菲涅耳透镜,聚焦红外信号。PIR传感器需要一个“热身”时间正常。这是由于沉降时间参与学习的环境。这可能是10至60秒。在这段时间里,应尽可能的小运动的角度传感器领域。有一个可变电阻(P1)在控制上的传感器延迟时间的PIR传感器模块。顺时针转动该可变电阻器将较长的'对'的延迟时间而逆时针方向旋转将减少的延迟时间。PIR传感器具有约3至7米的距离。这是可能的调节距离的检测与第二可变电阻器的帮助(P2)的PIR传感器模块。
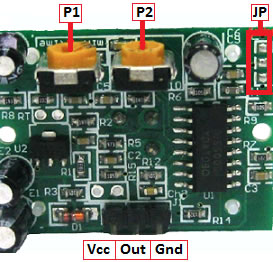
同样地,有一位跳点(JP)包括在PIR传感器模块。该传感器是活跃的高(低的空闲状态)时,在任一位置的跳线。在“触发”(H)的位置,输出保持高当传感器重复触发。在“正常”(L)的位置,输出高电平,那么低的时候触发。在反复高/低脉冲连续运动的结果。

电子控制电路的运动传感器是非常简单的自解释的。的PIR传感器模块的输出(基因)来连接到一个“传统”的单稳态多谐振荡器(MMV)有线在无处不在的定时器芯片NE555(IC1)。IC1的输出通过一个连接到6V的电磁继电器J1控制电磁阀。
两个发光二极管(LED 1和LED2)添加为系统状态指示灯。单刀双掷开关S1“自动/手动”模式选择器。开关S2可用于手工操作的水龙头。四节1.5V AA电池原型测试(1.5vx4 = 6V)。
笔记
记住设定延时时间与检测通过调整预置P1和P2盆的PIR传感器模块的范围内尽可能低的系统。将菲涅耳透镜,准直和筛选由一块合适的电气导管长度为2到3厘米,是不是一个坏主意,减少的PIR传感器模块的视野。地方跳投(JP)在“正常”的模式!
为什么一个设计PIR传感器?PIR传感器是小型,廉价的,低功耗,坚固耐用,易于界面,易于使用。当检测到运动的PIR传感器输出的输出引脚的高信号,可以读取由单片机或驱动晶体管开关高电流负载。
其最大的特点是,他们不会磨损!
零件
SEN 1:PIR传感器模块
T1:BC547
LED1:5mm绿色
LED2:5mm红色
D1:1N4007
IC1:NE555
R1,R2:1K
R3:100K
R4:470R
C1,C2:100nF
C3:100uF/ 16V
S1:单刀单掷开/关
S2:推动开关
J1:2针插头
继电器:6VDC / SPST继电器